
本製品は、赤外線リモコンでPC操作を行えるマクロ入力デバイスです。付属の赤外線リモコンを使って、キーボード入力やマウス操作をワンタッチで実行できます。
設定はとても簡単で、PCに接続してWebブラウザから操作を割り当てるだけ。プログラミングや専用ソフトのインストールは不要です。各リモコンボタンに、文章入力、ショートカットキー、マウス操作などを自由に設定できます。
割り当てた設定は本体に保存されるため、一度設定すれば、別のPCに接続しても同じ操作を行うことができます。
USBキーボード/マウスとして認識されるため、Windows、macOS、Linux、Raspberry Pi など、ドライバ不要で幅広い環境に対応します。※特殊機能キーはOSのよっては対応していません。
プレゼン操作、動画編集、配信操作、業務アプリの定型入力、デジタルサイネージ端末、手が離せない場面での操作補助など、さまざまな用途に活用できます。
「よく使う操作を、リモコン一つで実行したい」そんなニーズに応える、シンプルで実用的なマクロ入力デバイスです。
↓設定ツールはこちらをクリック↓(動作環境は、Chrome/Edgeです)

1. 設定ツールで出来ること
- 1~0*#↑←OK→↓(リモコンの各ボタン)に割り当てる動作(文字入力 / 特殊キー / マウス / 待ち)を編集
- デバイス(本体)から設定を読み込み(Load)
- 編集した設定をデバイスへ書き込み(Write)
- 設定を .comm ファイルとして保存/読み込み
- EEPROM クリア(設定初期化)
- ファームウェアアップデート
2. 基本手順
2.1 接続

1) 本体ドングルをPCに接続する
2) ブラウザで設定ツールを開く
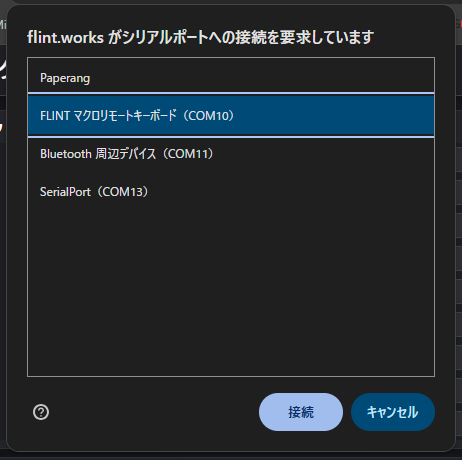
3) ポート選択ダイアログで、「FLINT マクロリモコンキーボード(COM?)のシリアルポートを選ぶ
4) 接続 を押す
2.2 既存設定の読み込み(Load)
1) 読み込み(Load) を押すとPad欄に現在の設定が表示されます。
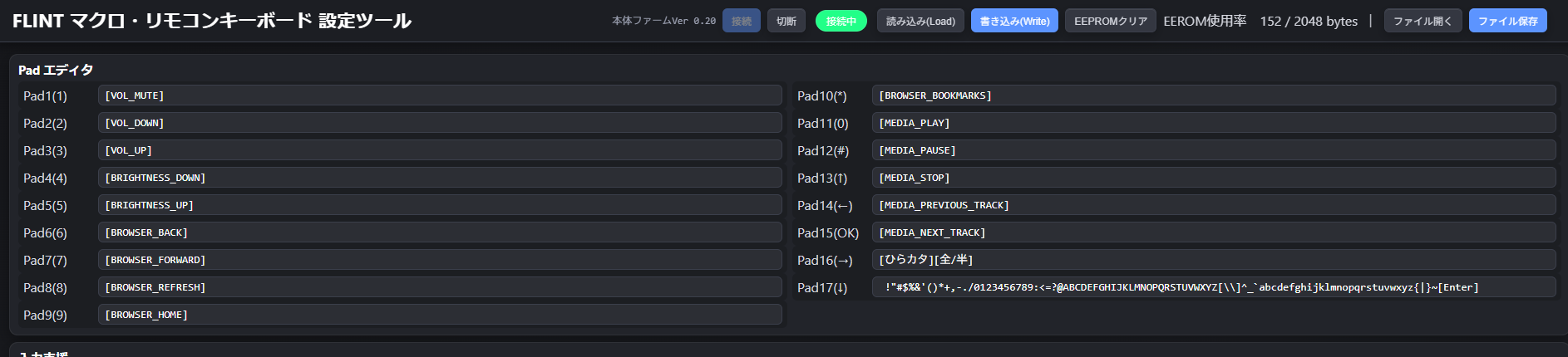
2.3 Padの編集
1) 編集したいPadの入力欄をクリックして「選択」する(枠が強調されます)
2) キーボード/マウス/特殊機能のボタンを押して内容を追加
3) 必要に応じて手入力で微調整

4.4 書き込み(Write)
1) 書き込み(Write) を押す
2) ログに OK COMM SAVED ... と OK が出たら完了です
3. 画面の見方

- 接続/切断: 本体とシリアル接続します
- 読み込み(Load): 本体のEEPROMから現在の設定を読み込みます
- 書き込み(Write): 画面の設定を本体へ書き込みます
- EEPROMクリア: 本体の設定領域(マクロ)を消去します(画面のPad欄も空になります)
- EEROM使用率: 送信データ量の目安です(2048 bytesが上限目安)。赤字は上限超えです
- ファイル開く/保存:
.commファイルの読み込み/保存
中央:
- Pad エディタ: Pad1~Pad17 の入力欄。ここに「動作」を文字列で記述します
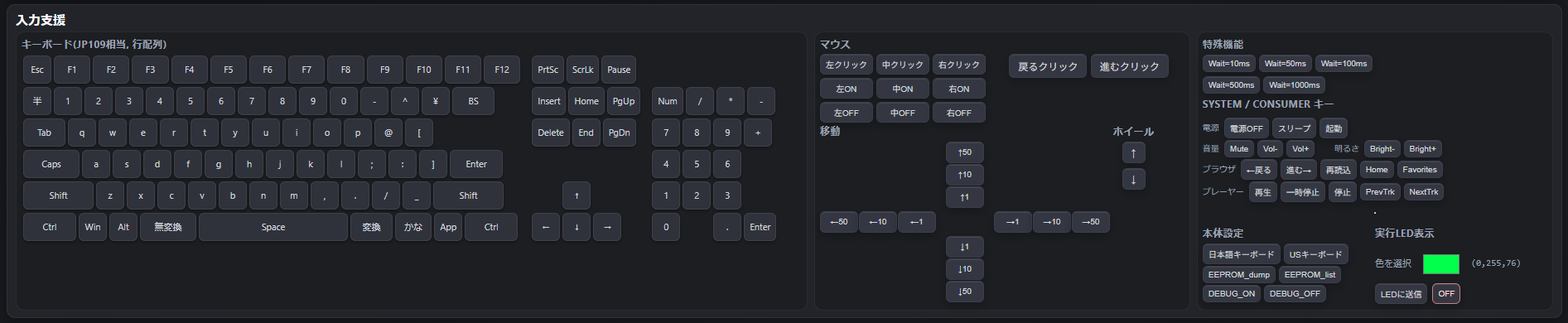
- キーボード: クリックで、選択中のPad入力欄へ追加します
- マウス: クリック・押下/離し・移動・ホイールを追加します
- 特殊機能: Wait(待ち)など
- System / Consumer キー: 音量・メディア・ブラウザ等のキー
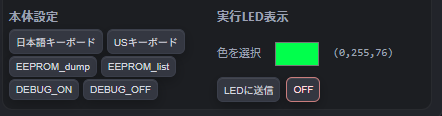
- 本体設定:
LAYOUT_JP/US、EEPROM_dump/list、DEBUG_ON/OFF - 実行LED表示: LED色(
LED_RGB=...)を本体へ送信します

- ログ: 本体からの応答(
OK...やCOMM...)が表示されます - ファームウェアアップデート ボタン:ドングルのファームウェアを書き換えます
4. Pad入力欄の書き方
Pad入力欄は「データコード文字列」です。
- 普通の文字(ASCII)はそのまま入力できます(例:
Hello) - 特殊な操作は
[...]の形式で入力できます(ツールのボタンで自動入力されます)
4.1 よく使う例
- 文字を入力してEnter:
Hello[Enter] - 1000ms待つ:
[WAIT=1000ms] - マウスを右へ10移動:
[M_RIGHT=10] - マウス左クリック:
[CLICK=L] - Ctrlを押しながら c を入力(コピー):
[PRESS=LEFT_CTRL]c[RELEASE=LEFT_CTRL]
4.2 代表的なトークン
- キーボード(例):
[Enter][ESC][TAB][BS][↑][↓][←][→][F1]?[F12]- 押しっぱなし表現:
[PRESS=LEFT_CTRL]/[RELEASE=LEFT_CTRL](Shift/Alt/Win なども同様)- マウス:
[M_UP=n][M_DOWN=n][M_LEFT=n][M_RIGHT=n][WHEEL_UP=n][WHEEL_DN=n][CLICK=L|R|M|PREV|NEXT][MPRESS=L|R|M|PREV|NEXT]/[MREL=L|R|M|PREV|NEXT]- System / Consumer(ツールのボタンから入れるのが確実):
[VOL_UP][VOL_DOWN][VOL_MUTE][MEDIA_PLAY][MEDIA_PAUSE][MEDIA_STOP]など
5. ファイル保存/読み込み(.comm)
5.1 ファイル保存
1) ファイル保存 を押す
2) 画面のPad設定が COMM...<00> 形式で .comm として保存されます
5.2 ファイルを開く
1) ファイル開く を押す
2) .comm を選ぶ
3) COMM... 行がPad欄に展開されます
6. EEPROMクリア(初期化)
EEPROMクリア を押すと本体に EEPROM_clear を送信します。画面のPad欄もすべて空になります。
※ 取り消しはできません。事前にファイル保存しておくのがおすすめです。
7. 本体設定(レイアウト/デバッグ/LED)
本体設定は、本体に直接記録される設定です。ボタンを押したときに本体に設定されます。
- 日本語キーボード / USキーボード
- 本体へ
LAYOUT_JP/LAYOUT_USを送信します - EEPROM_dump / EEPROM_list
- 本体へコマンドを送信し、ログに表示します
- DEBUG_ON / DEBUG_OFF
- 本体のデバッグ出力を切り替えます
- 実行LED表示
- リモコンからの信号を受信して、キーやマウスを動かしている時に点灯します。
- 色を選んで LEDに送信 →
LED_RGB=R,G,Bを送信します。OFF →LED_RGB=0,0,0を送信します
8. ファームウェアアップデート
ファームウェア
| バージョン | リリース日 | ファイル | 変更内容 |
|---|---|---|---|
| 1.00 | 2026/01/03 | ファイル | 初期リリース |
1) 本体を 接続 した状態で、下部の ファームウェアアップデート を押す
2) 確認ダイアログOK
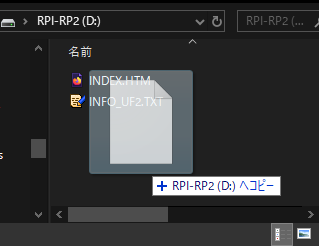
3) PCに RPI-RP2 ドライブが出たら、ファームウェアの .uf2 ファイルをドラッグ&ドロップします
4)本体と接続すると、ファームバージョンが表示されるので、ちゃんとバージョンアップされたか確認します。

9. よくあるトラブル
- 「このブラウザは Web Serial に対応していません」と表示される
- Chrome / Edge を使ってください
- 接続できない / ポートが出ない
- Arduino IDE のシリアルモニタ等、他のアプリがポートを掴んでいないか確認
延長USBケーブルやHUBを使っている場合は、直接PCに接続してみる
- Writeでエラーになる(不正な文字列)
- […] や <..> の形式が崩れていないか確認
よく分からない場合、ボタン入力で組み立てるのが安全です
安全上の注意
このデバイスはPCに対して「キーボード/マウス」として動作します。
- テスト時はメモ帳など、影響が小さいアプリで確認してください
- 意図しない入力が起きる可能性があるため、重要な画面(パスワード入力など)では操作しないでください
- リモコンの通信信号は、汎用的なものなので他のリモコンでも反応する可能性があります。使用にはご注意ください。
本体ドングルのファームプログラムをするには
この本体ドングルは、RP2040のマイコンを使っています。汎用マイコンボートとしてArduinoIDEなどでプログラミングが可能です。スペックや回路などの情報はこちらをご覧ください。